3 DOF Longitudinal Model with ABS using Simulink
September 2024 - December 2024
For my Smart Vehicle coursework, I focused on developing and simulating advanced vehicle models and control systems using MATLAB Simulink. This project allowed me to apply control theory, system modeling, and simulation validation techniques to automotive engineering problems.
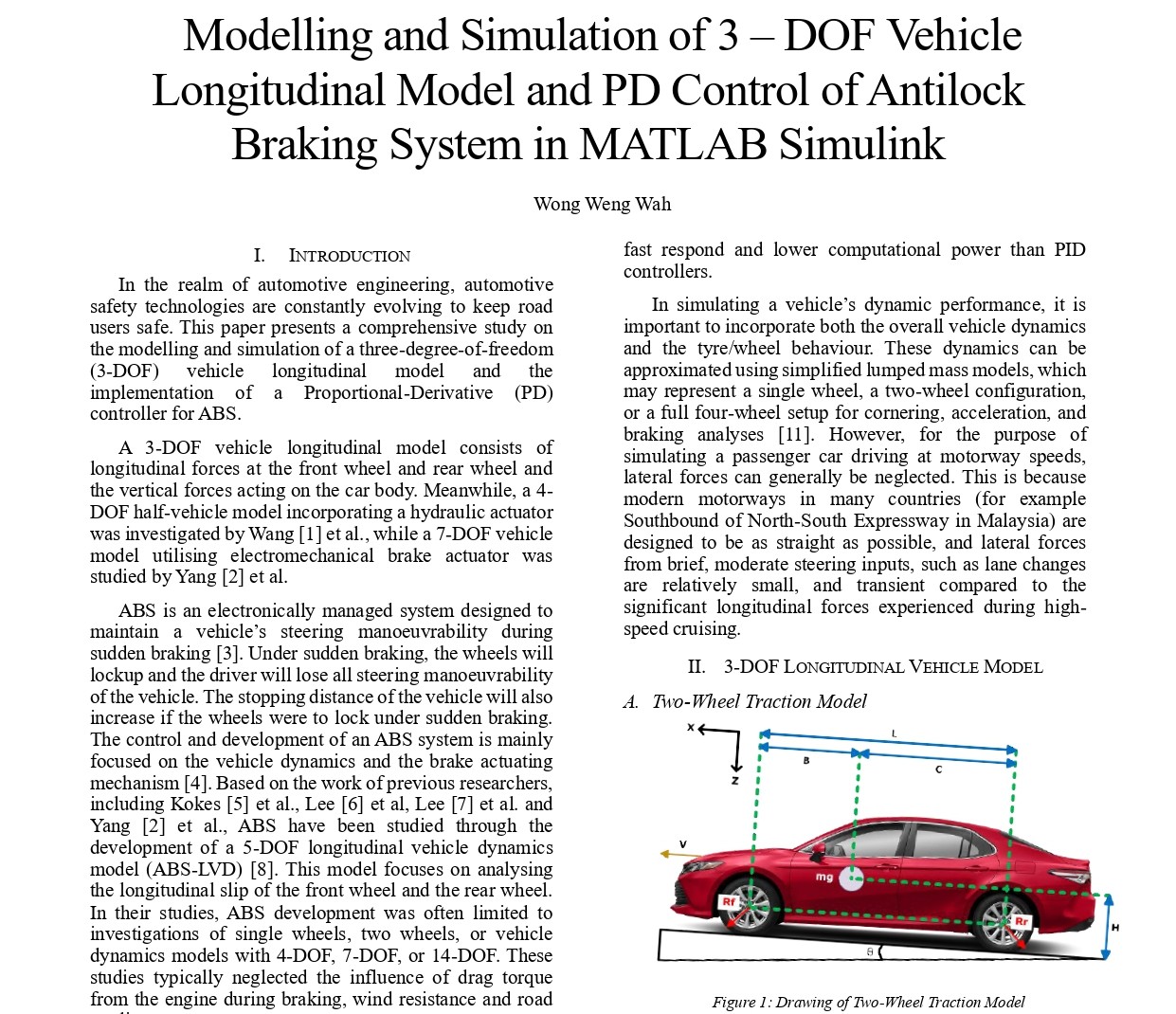
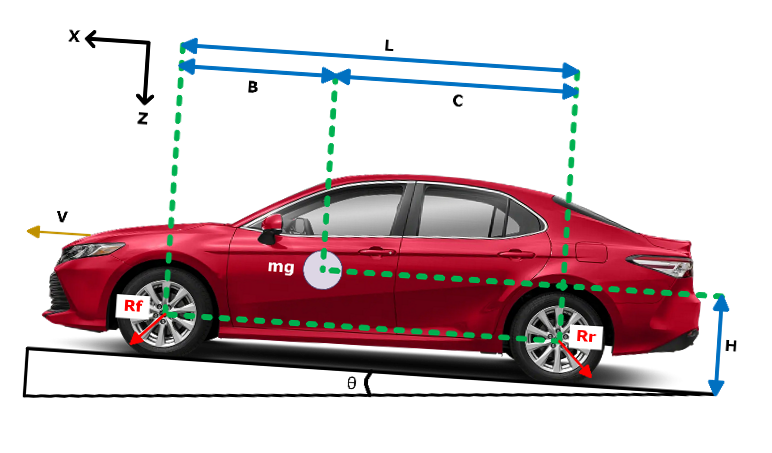
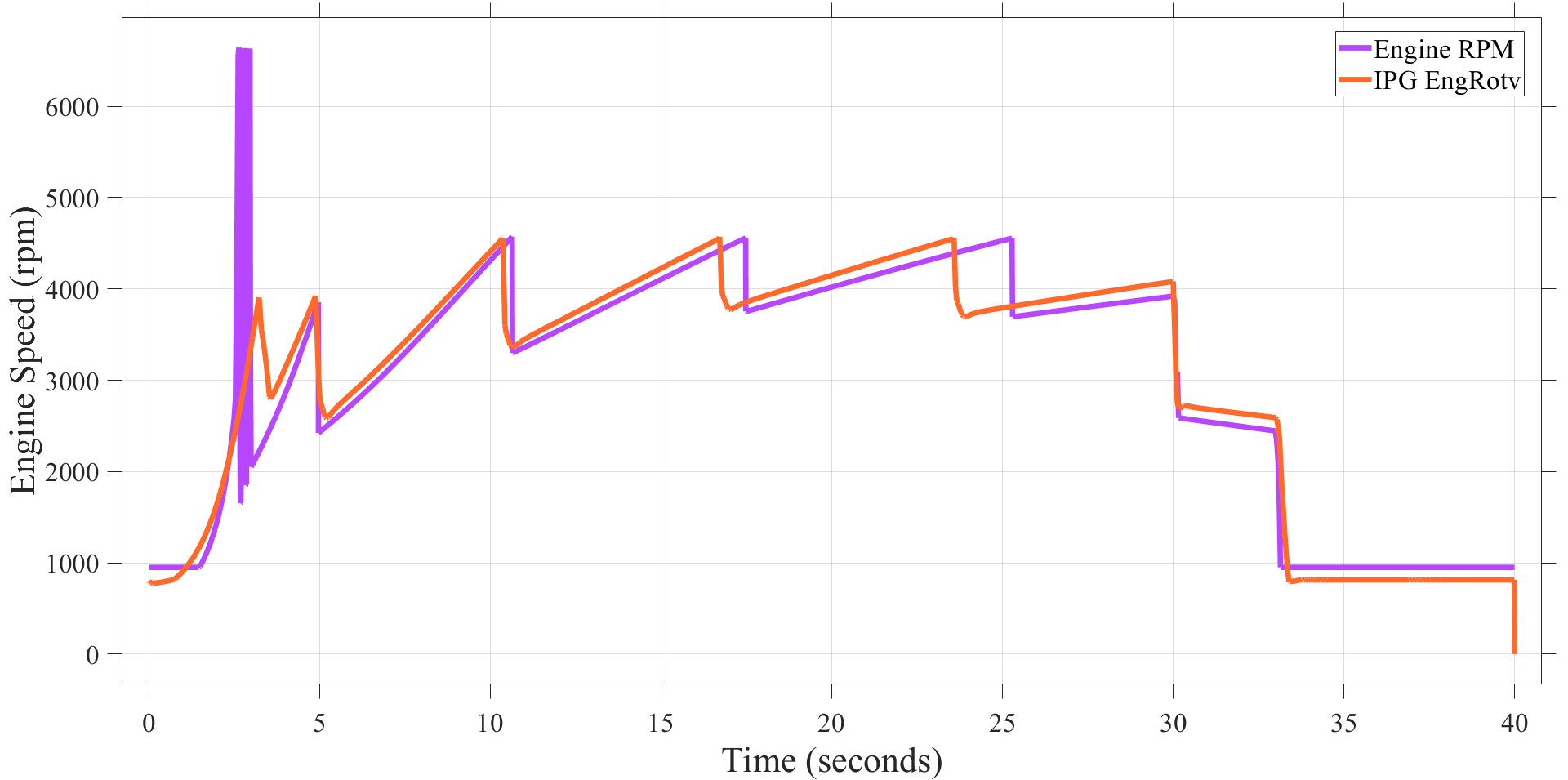
I built a 3 DOF longitudinal vehicle model from scratch in MATLAB Simulink and validated it againt data from IPG Carmaker. The model achieved a very low mean squared error (MSE), proving its accuracy compared to the industry-standard simulation. The main highlight of this model was its automatic gearbox system, which dynamically reacts to throttle input and vehicle speed, demonstrating realistic powertrain behaviour.
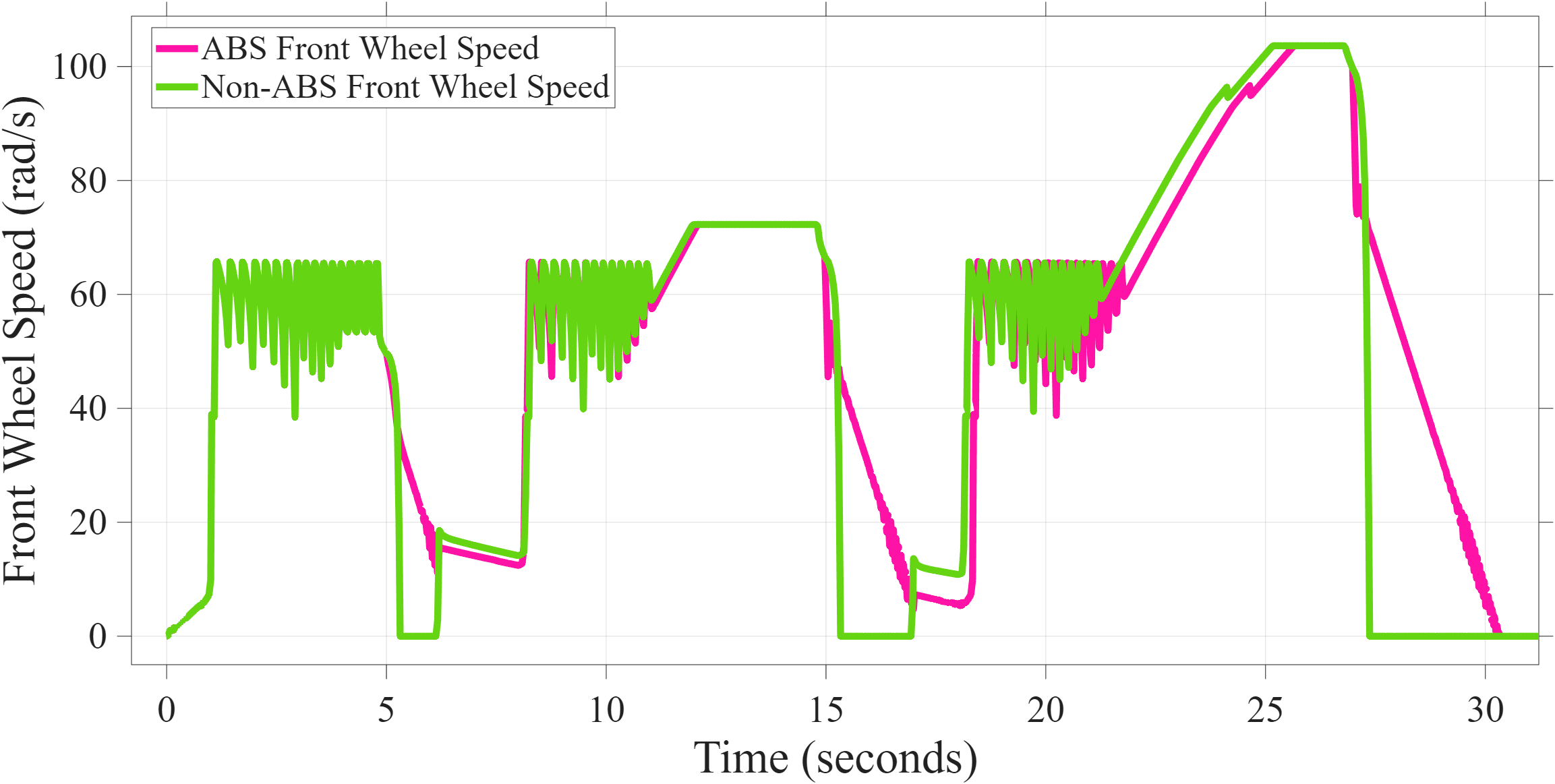
I also designed a PD-based Anti-lock Braking System (ABS) for the vehicle model. By testing performance with and without ABS across different speeds and road inclines, I confirmed the system's effectiveness — achieving consistently shorter braking distances when ABS was active.
As part of this coursework, I also authored an IEEE-style paper. If you would like to learn more, additional resources are available for download below, including the full Simulink model and the paper itself.